My hardware kit was supposed to have the needed metric cap screws, washers, nuts, etc for a Prusa I2 build but since there are many different iterations of the I2 it really wasn't complete. I found a couple additional kits of 25 pieces of M3 screws and picked up some different 10mm, 15mm, and 25mm lengths to have during the process. With the needed screws on hand I could try to move froward with more assemble.
JerZ to the Rescue
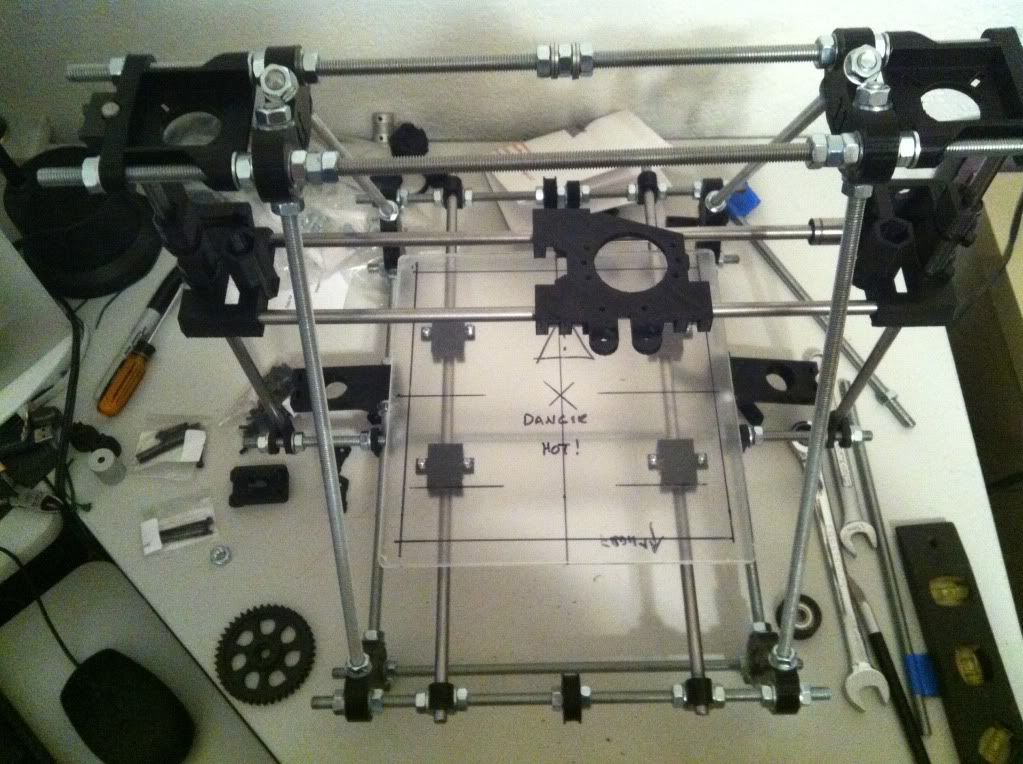
Although my parts kit came with some lower Z stabilizers, it did NOT come with the plastic caps required to use them. The kit had two caps that are used on the top of the Z smooth rod but nothing for the bottom. After discussion in the LMR forum, it was advised to NOT use the stabilizer bearings and instead let the threaded Z rods dangle in the air allow some end movement. The point is that if you lock the ends down and the threaded rod isn't perfect, you will get X Axis movement that will create print errors.
For me, I really liked the method that the Z smooth rod end mounted down low making it much more likely to keep the rods parallel so JerZ offered to print up a couple end caps that were missing and mailed them to me. The worked great and it was much appreciated! This removed the extra wide lower center threaded rod and cross bar clamps and the need to make a lot of adjustments to keep the Z rods parallel. That's what I think anyhow.
Step Step Step - Steppers

After looking/poking/questioning around I locked down on a set found on ebay that are NEMA17, 76 oz-in holding torque, 4.2v, have the D Shaft, and are 1.8 degrees per step which I believe is the correct specs for what I'm doing. The actual part number is KL17H248-15-4A. They do NOT have sockets at the motor but they do have nice 750mm leads on them making it much easier to route the wiring back to the electronics.
"Some Clearancing May Be Required"
You see this with most printed printer parts you find online. Basically it's saying "Hey, these are printed parts, they are pretty dang close but you have to cut on them some to make them work". And cut on them I did have to. The worse areas were the 3mm nut capture areas that the nuts just would not fit into. Exacto knife skills saved the day but be warned, it's still easy to split parts due to the layered method of printing. I also just smoother some of the edges up, cleaned up stray strings, etc to try and make it all work and look a little better.
This was especially true on the extruder build and I did split out a couple parts slightly. I used some superglue to fill in the split and hope that will resolve any long term issues.

The hobbed bolt is another part that could have been built at home I guess. It's a basic 8mm bolt with a notch and ribbing done on it but for $12 I found two online with the nuts and washers and figured it would take me longer to try to do it myself than $12 worth of time.
Hot End
To melt the plastic and get it down to the sub millimeter stream needed to print something, you need a "hot end". After research, reason, and lots of input from LMRians I went with the tried and true J-Head design. Since I picked mine up on ebay it is likely some knockoff but should work. It has a 0.4mm output, was supposed to be able to use 3mm or 1.75mm filament and had the heater and thermistor already installed and setup. I also had to get a mounting plate to hold it in the carriage and extruder. Hot end in hand, moving on. I had already ordered some 3mm black filament so I decided to do whatever was needed to make the J-Head use that size filament as I could tell it was setup for 1.75mm when I got it. After pulling it apart and discussing with hoff70 it became apparent that the head was MADE for 1.75mm but COULD be drilled out for 3mm. Looking back I can see the ad for the unit said THEY will drill it out for 3mm if you want before shipping. So another minor setback, can't use the 3mm filament I have now but the recommendation was to go with the 1.75mm size. It is supposed to be better/cooler/tighter/etc anyhow. So I coughed up some more money and ordered some 1.75mm black and went ahead and ordered some red as well as I really didn't want to be stuck printing black for too long.
Getting There
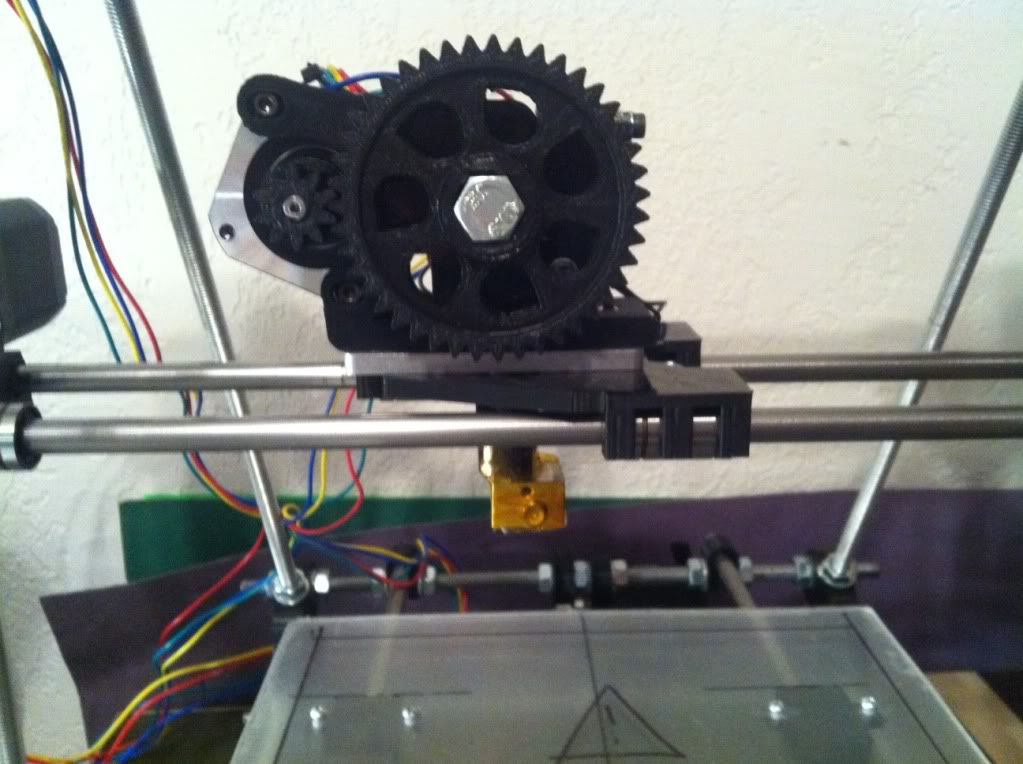
With the extruder together and the recently purchased hot end in hand, I finished mounting the extruder to the carriage. Still no belt on it but wanted to make sure it all fits together, belt route clear, etc before doing that. One thing again about clearance work, be care and make sure the nuts fit in the captures. The but was a little tight on one side of the hot end mount and forcing it in created another small layer split.
With the extruder on the carriage I checked the movement back and forth and although tight I believe it is working as it should.
Mounting Steppers
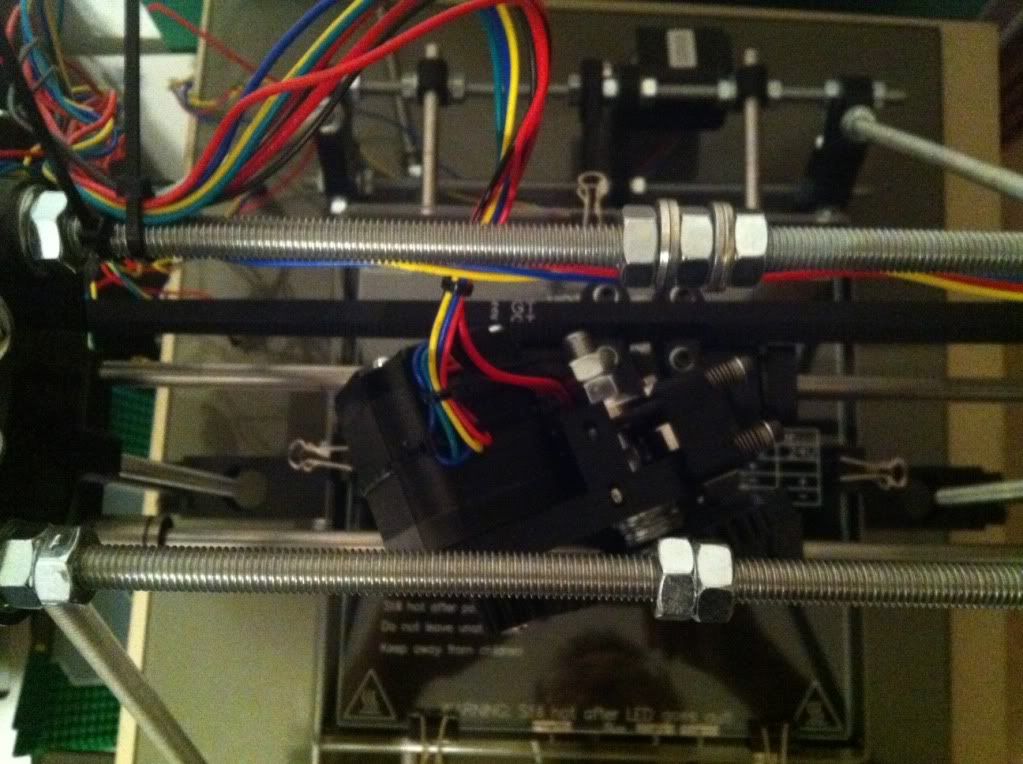
Mounting the steppers is really pretty straight forward. I just needed to make sure I used the correct length cap screws that weren't too long but not too short either. Some clearance work on the mounting slots and they fit just fine. There is now a mass of wires going nowhere but I'm not routing anything until I have the electronics in hand and plan where to mount it all.
With the Z Axis motors in I hooked up the CNC aluminum couplers that connect to the Z threaded rods. These seem much better and isolating any threaded Z rod imperfections but with anything there are those who say don't use them as well. Some say they will sag/stretch over time affecting the Z axis. Maybe so but they seem to much better than a hard clamped mount that comes with the original parts kit. I think with some continuous tune ups and system checks any sagging can be adjusted out as needed.
The Print Bed
A very important piece that needs to be right is the print bed. Although many get great results from printing on anything, I figured I need to build what I want up front. With that in mind, I included a heated print bed in my kit so I could print ABS later on if desired, but also it seemed like the easiest way to mount a nice thin setup. For the base, I used some 1/4 acrylic that I picked up at the local hardware store. I noticed that many use it as their base as it's flat, easy to cut, and just looks nice. After I cut it out to the basic size, I did hear from some on LMR that you need to protect it from heat if you are mounting a heated bed as it can warp. Figures.
So with a nice piece of acrylic for the lower bed mount, I ended up covering it up with some classic Mr. Gasket exhaust gasket sheet that I plucked from my garage and my car hobbies. This stuff can handle hundreds of degrees so it should protect the acrylic from the heat bed. I even mounted with the Mr. Gasket logo up top just for the heck of it.
I also picked up some small springs at the hardware store to use to mount the heat bed/glass on for adjust-ability as many have done. I could have used ball point pen springs but these are similar and should work fine.
Belted
Next up was to get the belts on for the X and Y axis. I mounted the Y axis bed belt first using the included belt clamps but also use the trick of using small zip ties to hold a loop at the end of each belt and then one to tighten those loops together so you can pull the belt tight with the zip tie before tightening down the clamps. Worked well for the bed and I had smooth motion to and fro.
The X carriage setup wasn't quite as easy as there is not enough room between the two clamps to do the zip tie method. For this I clamped down one belt end and then left some extra length on the other end allowing me to pull it tight and clamp it down. Carriage moves left and right fine without any issues!
Extruder Mount
Summary To Date
So at this point the chassis is built, lower print bed mounted, steppers mounted, extruder and hot end mounted, all axis are moving properly manually and I've started routing and organizing wires. I've also labeled all the steppers with my label machine. Electronics are here so last steps are finalize bed leveling setup with springs, wire up the heat bed eventually along with the thermistor for that. More to come!